Project:
MARS PHOTOGRAMMERTY

Mars Photogrammetry uncertainty Visualization
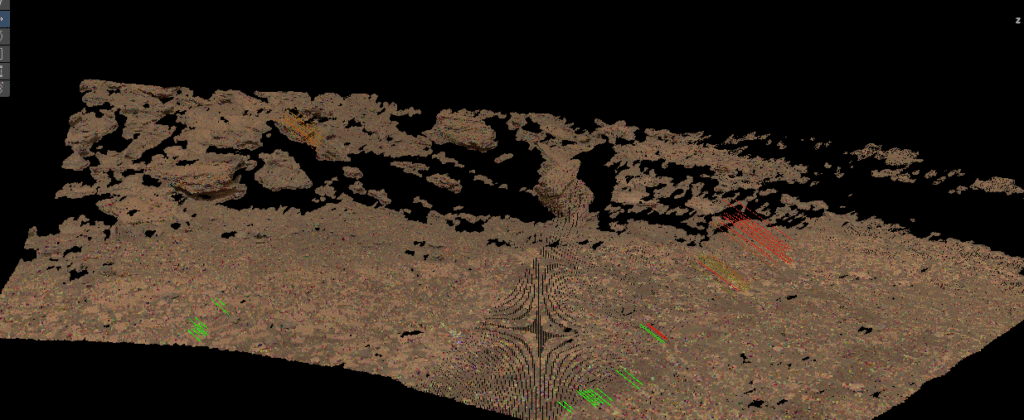
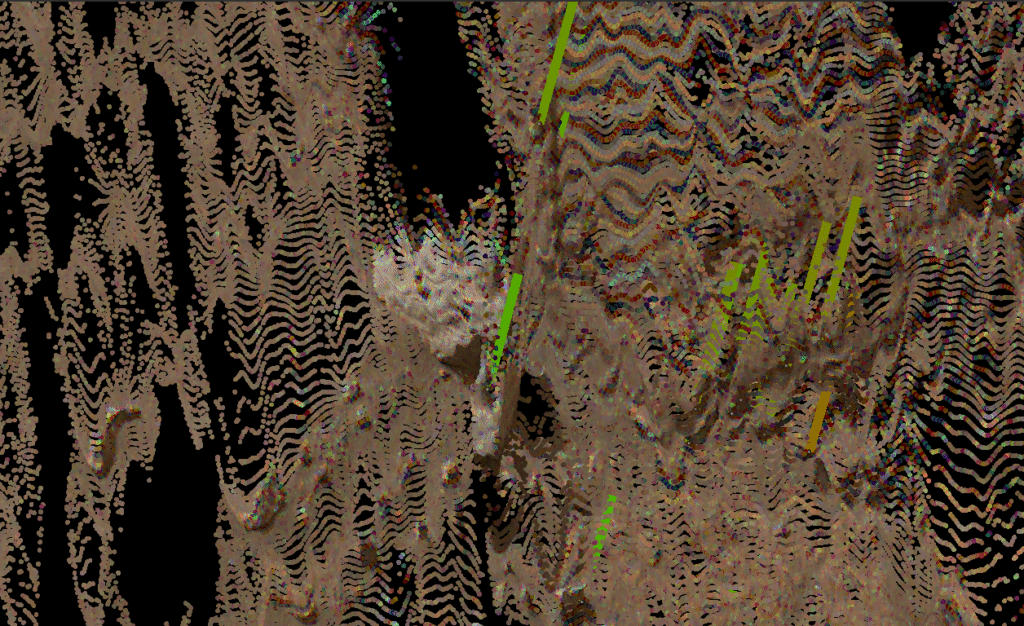
This project explores reprojection error through real-time rendering of point clouds of the martian terrain. The input data is from the Mastcam-Z onboard NASA’s Perseverance Rover. The 3D position of the points are derived from JPL’s .XYZ products which are a result of multi-view stereo processing. The visual enables researchers to gain an understanding of error patterns and locate potential imprecision in camera calibration.
Perfect calibration would mean that the 3D positions of feature points would be consistent across stereo pairs, however, that is not the case for this dataset. We calculate the error offset by finding the difference in magnitude between the 3D position of feature points reported across different stereo pairs. The offset data is saved to a .JSON and unpacked in the Unity Game Engine. The offset vectors are rendered as line segments color coded by the magnitude of the error.
Mars Photogrammetry Tutorial IEEEVR '24
The tutorial provided an in-depth exploration of the methodologies and techniques necessary for leveraging Mastcam-Z data to generate scientifically accurate and educationally relevant 3D models of Martian terrains. Aimed at individuals with a foundational understanding of game engines and 3D modeling, this instructional guide delved into the process of accessing and utilizing the wealth of information available in NASA’s Planetary Data System. Participants learned the application of photogrammetry principles to accurately reconstruct Martian landscapes, enhancing their fidelity and immersion. Furthermore, the tutorial introduced the use of the NASA JPL Landform tool, a pivotal resource for advanced visualization and analysis of Martian terrains. By offering a comprehensive walkthrough from data acquisition to the final 3D model production, the tutorial equipped attendees with the necessary skills to contribute to the field of planetary science visualization, fostering a deeper understanding of Martian geology and topography.